Publications
Please visit my Google Scholar or ORCiD for a full list
Research Highlights

A solar-powered fixed-wing UAV design achieving extended flight endurance through optimized energy harvesting and management.
Y. Chu; C. Ho; Y. Lee; B. Li*
<summary>BibTeX</summary>
<pre>@article{chu2021solar, title={Development of a Solar-Powered Unmanned Aerial Vehicle for Extended Flight Endurance}, author={Chu, Y. and Ho, C. and Lee, Y. and Li, B.}, journal={Drones}, volume={5}, number={2}, pages={44}, year={2021}, publisher={MDPI} }
</pre>

A learning-based autonomous UAV system combining deep learning and flight control for automated E&M device inspection.
Y. Feng; K. Tse; S. Chen; C.-Y. Wen; B. Li*
<summary>BibTeX</summary>
<pre>@article{feng2021learning, title={Learning-Based Autonomous {UAV} System for Electrical and Mechanical ({E\&M}) Device Inspection}, author={Feng, Y. and Tse, K. and Chen, S. and Wen, C.-Y. and Li, B.}, journal={Sensors}, volume={21}, number={4}, pages={1385}, year={2021}, publisher={MDPI} }
</pre>
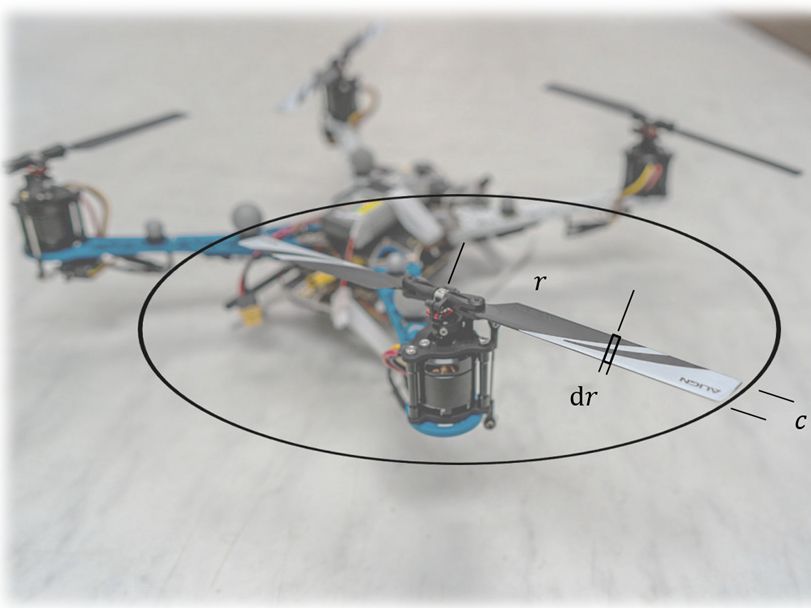
A novel actuator allocation method for variable-pitch propeller quadrotors enabling improved maneuverability and efficiency.
C.-W. Chang, S. Chen, C.-Y. Wen, and B. Li*
<summary>BibTeX</summary>
<pre>@article{chang2020actuator, title={An Actuator Allocation Method for a Variable-Pitch Propeller System of Quadrotor-based {UAVs}}, author={Chang, C.-W. and Chen, S. and Wen, C.-Y. and Li, B.}, journal={Sensors}, volume={20}, number={19}, pages={5651}, year={2020}, publisher={MDPI} }
</pre>
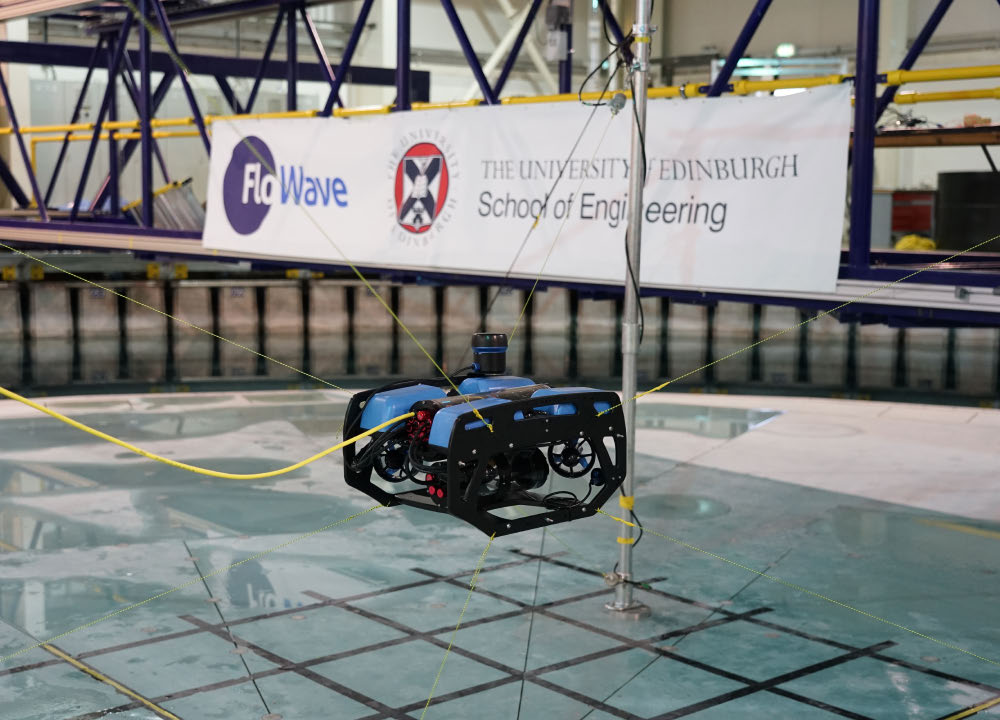
A nonlinear MPC framework for ROV trajectory tracking with active disturbance rejection in underwater environments.
Y Cao, B Li, Q Li, AA Stokes, DM Ingram, A Kiprakis
<summary>BibTeX</summary>
<pre>@article{cao2020nonlinear, title={A Nonlinear Model Predictive Controller for Remotely Operated Underwater Vehicles With Disturbance Rejection}, author={Cao, Y. and Li, B. and Li, Q. and Stokes, A.A. and Ingram, D.M. and Kiprakis, A.}, journal={{IEEE} Access}, volume={8}, pages={158801--158820}, year={2020}, publisher={IEEE} }
</pre>

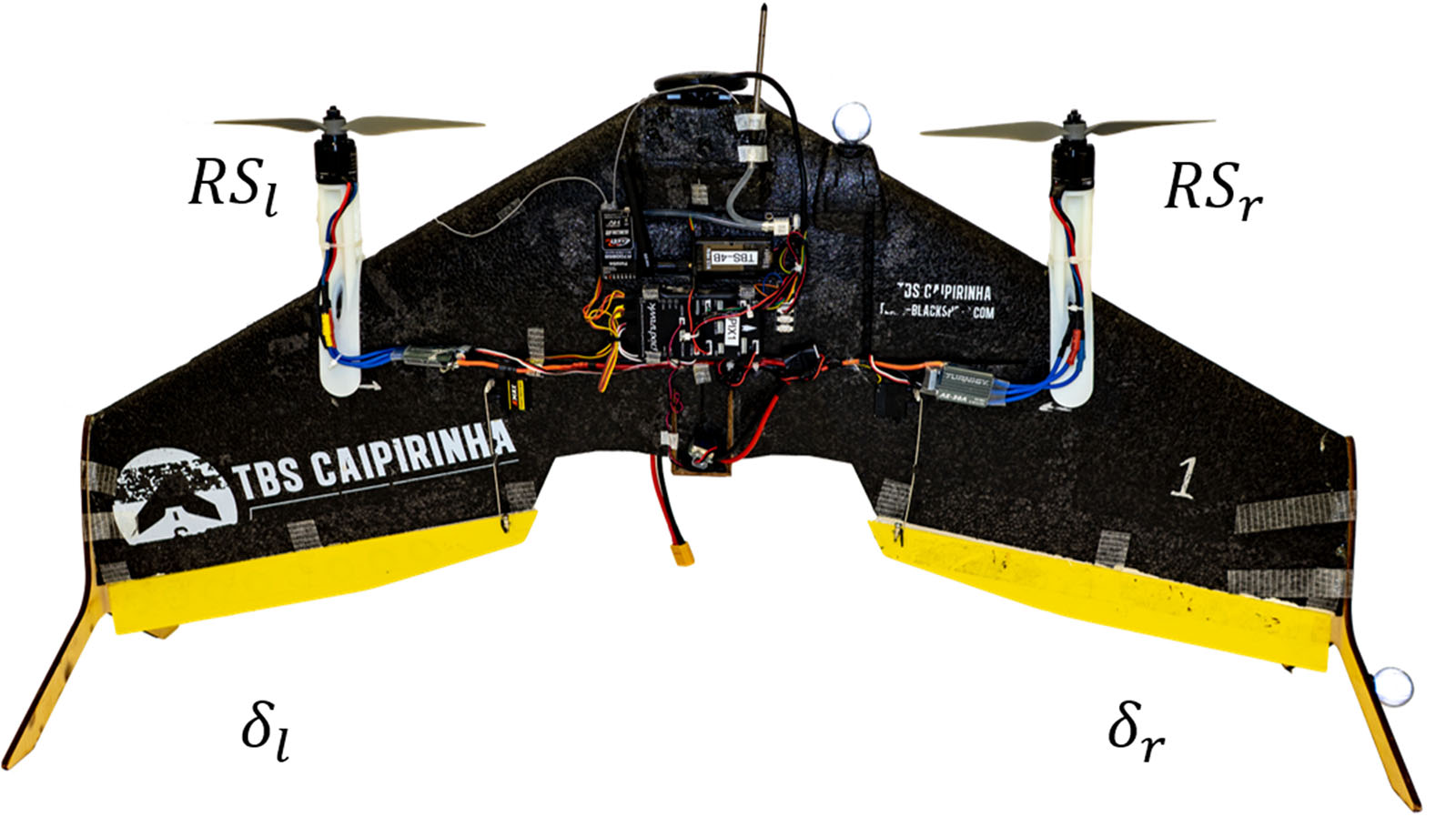
An optimal control method for smooth transition between hover and cruise flight modes in tail-sitter VTOL UAVs, validated through flight experiments.
B. Li, J. Sun, W. Zhou, C.Y. Wen, K.H. Low, C.K. Chen
<summary>BibTeX</summary>
<pre>@article{li2020optimal, title={An Optimal Transition Control Method for Tail-sitter {VTOL UAVs}}, author={Li, B. and Sun, J. and Zhou, W. and Wen, C.Y. and Low, K.H. and Chen, C.K.}, journal={{IEEE/ASME} Transactions on Mechatronics}, volume={25}, number={5}, pages={2534--2545}, year={2020}, publisher={IEEE} }
</pre>
A model-aided approach fusing aerodynamic models with onboard sensor data for accurate in-flight wind estimation on tail-sitter UAVs.
J. Sun, B. Li, C.Y. Wen, C.K. Chen
<summary>BibTeX</summary>
<pre>@article{sun2020wind, title={Model-Aided Wind Estimation Method for a Tail-Sitter Aircraft}, author={Sun, J. and Li, B. and Wen, C.Y. and Chen, C.K.}, journal={{IEEE} Transactions on Aerospace and Electronic Systems}, volume={56}, number={2}, pages={1262--1278}, year={2020}, publisher={IEEE} }
</pre>

A vision-based UAV system for real-time target detection and geo-positioning to support search and rescue operations.
J. Sun, B. Li, Y. Jiang, C. Y. Wen
<summary>BibTeX</summary>
<pre>@article{sun2016camera, title={A Camera-Based Target Detection and Positioning {UAV} System for Search and Rescue ({SAR}) Purposes}, author={Sun, J. and Li, B. and Jiang, Y. and Wen, C.-Y.}, journal={Sensors}, volume={16}, number={11}, pages={1778}, year={2016}, publisher={MDPI} }
</pre>
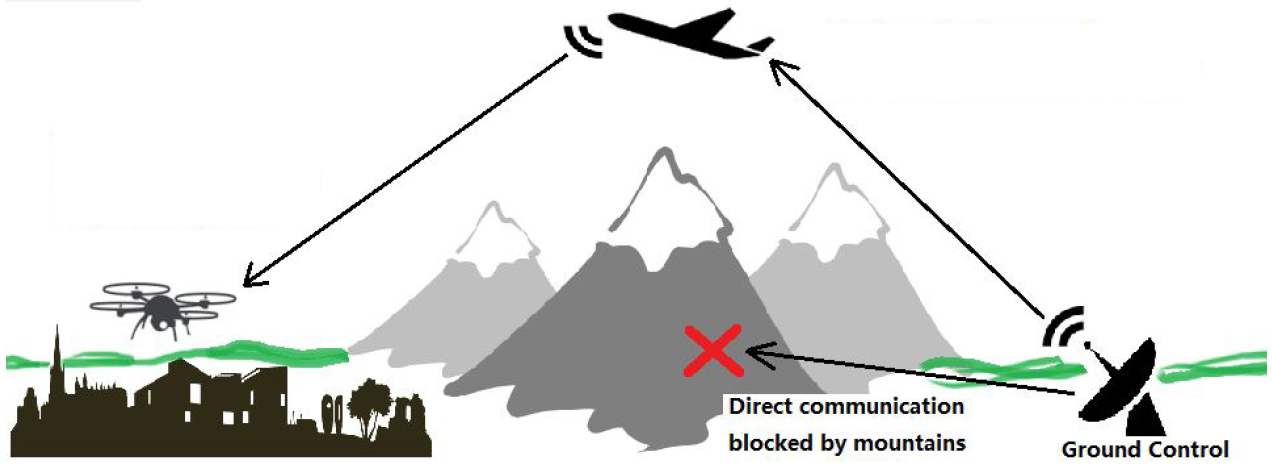
Design and field testing of a dual-UAV relay system that extends wireless communication range for ground operations.
B. Li, Y. Jiang, J. Sun, L. Cai, C. Y. Wen
<summary>BibTeX</summary>
<pre>@article{li2016relay, title={Development and Testing of a Two-{UAV} Communication Relay System}, author={Li, B. and Jiang, Y. and Sun, J. and Cai, L. and Wen, C.-Y.}, journal={Sensors}, volume={16}, number={10}, pages={1696}, year={2016}, publisher={MDPI} }
</pre>
All Publications
2021
-
Development of a Solar-Powered Unmanned Aerial Vehicle for Extended Flight Endurance
*Y. Chu; C. Ho; Y. Lee; B. Li**
Drones (2021) -
Learning-Based Autonomous UAV System for Electrical and Mechanical (E&M) Device Inspection
*Y. Feng; K. Tse; S. Chen; C.-Y. Wen; B. Li**
Sensors (2021)
2020
-
System Identification and Control for a Tail-sitter Unmanned Aerial Vehicle in the Cruise Flight
*W. Zhou, S. Chen, C.-W. Chang, C.-Y. Wen, C.-K. Chen, and B. Li**
IEEE Access (2020) -
An Actuator Allocation Method for a Variable-Pitch Propeller System of Quadrotor-based UAVs
*C.-W. Chang, S. Chen, C.-Y. Wen, and B. Li**
Sensors (2020) -
A Nonlinear Model Predictive Controller for Remotely Operated Underwater Vehicles With Disturbance Rejection
Y Cao, B Li, Q Li, AA Stokes, DM Ingram, A Kiprakis
IEEE Access (2020) -
Numerical Modelling and Experimental Testing of the Hydrodynamic Characteristics for an Open-Frame Remotely Operated Vehicle
Q Li, Y Cao, B Li, DM Ingram, A Kiprakis
JMSE (2020) -
An Optimal Transition Control Method for Tail-sitter VTOL UAVs
B. Li, J. Sun, W. Zhou, C.Y. Wen, K.H. Low, C.K. Chen
T-Mech (2020) -
Model-Aided Wind Estimation Method for a Tail-Sitter Aircraft
J. Sun, B. Li, C.Y. Wen, C.K. Chen
T-AES (2020)
2019
- Adaptive Model Predictive Control Method for a Tail-Sitter VTOL UAV
W. Zhou, B. Li, J. Sun, C.Y. Wen, C.K. Chen
CEP (2019)
2018
-
Design and Implementation of a Real-time Hardware-in-the-loop Testing Platform for a Dual-rotor Tail-sitter Unmanned Aerial Vehicle
J. Sun, B. Li, C.-Y. Wen, C.-K. Chen
Mechatronics (2018) -
Development of Model Predictive Controller for a Tail-Sitter VTOL UAV in Hover Flight
B. Li, W. Zhou, J. Sun, C. Y. Wen, C. K. Chen
Sensors (2018)
2016
-
A Camera-Based Target Detection and Positioning UAV System for Search and Rescue (SAR) Purposes
J. Sun, B. Li, Y. Jiang, C. Y. Wen
Sensors (2016) -
Development and Testing of a Two-UAV Communication Relay System
B. Li, Y. Jiang, J. Sun, L. Cai, C. Y. Wen
Sensors (2016)